ROS提高篇
只有干货,没有废话
书山有路勤为径,学海无涯苦作舟
冲就对了
1. 进阶操作
1.1 工作空间及功能包
mkdir -p ~/work_space/src cd ~/work_space/src catkin_init_workspace
catkin_make -DCATKIN_WHITELIST_PACKAGES="package_name1;package_name2"
注意在使用了以下命令后,想要重新编译整个工作空间,并不是使用catkin_make,而是需要使用上述指令且包名留空白 。
CMakeLists.txt:编译规则文件 。
package.xml:功能包描述文件 。
1.2 launch文件详解
<launch > ... </launch > <node > # 启动节点 <include > # 嵌套<remap > # 话题重命名<param > # 全局参数<rosparam > # 加载参数文件<group > # 节点分组<arg > # 局部参数<machine > # 远程标签<env > # 环境变量<test > # 测试节点
1.2.1 node标签
rosrun <package_name > <executable|python> <node pkg ="package_name" type ="executable|python" name ="node_name" args ="$(arg map_file)" output ="screen" respawn ="true" required ="false" ns ="" > </node >
结合上述代码:
含义:启动包中的某可执行文件,并重命名该节点名为node_name(在对节点进行初始化的时候也存在节点命名,但launch文件会覆盖该命名)。
例子:
rosrun turn_on_wheeltec_robot wheeltec_robot_node <node pkg ="turn_on_wheeltec_robot" type ="wheeltec_robot_node" name ="wheeltec_robot" />
属性
含义
pkg
功能包
type
可执行文件
name
重命名节点名
args
传递参数
output
日志输出
respawn
“true”,节点失效则重启,默认false
required
“true”,节点失效则关闭整个launch文件,默认false
ns
在命名空间中运行此节点
1.2.2 include标签
<include file ="$(find turn_on_wheeltec_robot)/launch/include/dwa_local_planner.launch" /> <include file ="$(find turn_on_wheeltec_robot)/launch/include/base_serial.launch" unless ="$(arg repeat)" > <arg name ="odom_frame_id" value ="$(arg odom_frame_id)" /> <arg name ="use_FDI_IMU_GNSS" value ="$(arg use_FDI_IMU_GNSS)" /> </include >
结合上述代码:
**$(find turn_on_wheeltec_robot):**索引文件,作用:**打开该目录下的dwa_local_planner.launch文件,**一行结束。
include可以包含其它内容。
1.2.3 arg、param、rosparam
arg:跟node中的args不同 ,在launch文件中声明一个参数。**param:**向参数服务器中传递一个参数。
rosparam:从.yaml文件中加载大量参数。
1.2.4 参数服务器与param
在launch文件中加载参数到参数服务器中:
<node pkg ="wheeltec_arm_pick" type ="wheeltec_$(arg moveit_num)" name ="wheeltec_$(arg moveit_num)" output ="screen" respawn ="true" > <param name ="joint_num" type ="int" value ="$(arg joint_num)" /> <param name ="usart_port_name" type ="string" value ="/dev/wheeltec_controller" /> <param name ="serial_baud_rate" type ="int" value ="115200" /> <param name ="robot_frame_id" type ="string" value ="base_footprint" /> <param name ="smoother_cmd_vel" type ="string" value ="smoother_cmd_vel" /> <param name ="product_number" type ="int" value ="0" /> </node >
上述代码:**将参数名为“name”以及数据类型为“type”传递参数值“value”,**加载五个参数到参数服务器中。
那么该怎样在C++使用呢:
ros::NodeHandle private_nh ("~" ) ; private_nh.param <std::string>("usart_port_name" , usart_port_name, "/dev/wheeltec_controller" ); private_nh.param <int >("serial_baud_rate" , serial_baud_rate, 115200 ); private_nh.param <std::string>("odom_frame_id" , odom_frame_id, "odom_combined" ); private_nh.param <std::string>("robot_frame_id" , robot_frame_id, "base_footprint" ); private_nh.param <std::string>("gyro_frame_id" , gyro_frame_id, "gyro_link" );
其中,初始值是当在参数服务器中找不到对应参数时,将初始值赋给变量。
1.2.5 arg与param
这种方法类似与局部变量赋值给全局变量:
<launch > <include file ="$(find turn_on_wheeltec_robot)/launch/wheeltec_camera.launch" /> <arg name ="markerId" default ="582" /> <arg name ="markerSize" default ="0.034" /> <arg name ="car_mode" default ="mini_mec" doc ="opt: mini_akm,senior_akm,top_akm_bs,top_akm_dl" /> <node pkg ="aruco_ros" type ="single" name ="aruco_single" > <param name ="marker_size" value ="$(arg markerSize)" /> <param name ="marker_id" value ="$(arg markerId)" /> </node > </launch >
定义arg属性,arg只在该launch文件中生效 。
**$(arg markerSize):**索引arg名称为markerSize参数,将其value值传给它。
**doc:**字典,供用户查看可选值。
1.2.6 group标签
group标签的作用有两种:
若干个节点划分进同一命名空间:
运行:rosrun turn_on_wheeltec_robot base_serial.launch,可以看见话题和节点加上了别名。
<group ns ="robot1" > <node pkg ="" type ="" name ="" output ="screen" respawn ="true" > <param name ="joint_num" type ="int" value ="$(arg joint_num)" /> <param name ="usart_port_name" type ="string" value ="/dev/wheeltec_controller" /> <param name ="serial_baud_rate" type ="int" value ="115200" /> <param name ="robot_frame_id" type ="string" value ="base_footprint" /> <param name ="smoother_cmd_vel" type ="string" value ="smoother_cmd_vel" /> <param name ="product_number" type ="int" value ="0" /> </node > </group >
注意,ns不与group结合使用也行,可单独使用,功能一样将节点划分到同一命名空间中,适合跨launch文件。
条件判断执行 :
1:条件成立执行,关键词“eval”,代表等式判别式。
2:条件成立不执行,关键词“eval”,代表等式判别式。
3:arg参数对应值为假,不执行。
<group if ="$(eval (a=='hello' or b=='no heelo') and c==true)" /> <group unless ="$(eval (a=='hello' or b=='no heelo') and c==true)" /> <group if ="$(arg lidar_is_cx)" >
注意,可直接 if = "1"。
注意,group可嵌套node标签,但node标签不可以嵌套group。
1.2.7 remap标签
<remap from = "/source_topic" to = "/rename_topic" />
remap分话题输入跟输出:
**输出:**节点发布话题,更改话题名称再发布。
**输入:**节点订阅话题,先重定向话题名称再订阅。
注意,无论是输入还是输出,本身话题都会消失。
1.3 节点句柄
**节点:**一个单独的可执行文件,ROS系统就是由多个节点组成的。
**节点句柄:**由ROS系统提供的对象,主要用于发布和订阅主题、调用服务、获取参数等。
1.3.1 创建节点句柄
创建节点句柄最简单的方式:
值得注意的是,在创建节点句柄之后有:
创造节点句柄的时候,若内部节点尚未启动,则节点句柄会先启动节点,同时同一节点下的句柄全被销毁,则节点关闭。
1.3.2 命名空间
同时,在创建句柄的时候,还允许自定义命名空间:
ros::NodeHandle nh ("namespace" ) ;
值得注意的是,若在launch文件中指定了node标签的ns属性,则nh属于该命名空间,若未指定,则属于namespace。
还可以创建多个节点句柄,同时为某个句柄指定父节点句柄 :
ros::NodeHandle nh1 ("ns1" ) ;ros::NodeHandle nh2 (nh1, "ns2" ) ;
1.3.3 全局命名
ros::NodeHandle nh ("/global_namespace" ) ;
注意:在ROS的命名中,加或不加/是存在区别的。 若加上/,说明这是一个全局命名,则无法再被放入一个命名空间当中;若不加/,则可以通过如launch中设置ns,使得该命名被放入到该命名空间当中。比如,我定义了两个发布器,发布话题分别为/cmd_vel与cmd_vel,此外若外部还存在一个命名空间为dwa_planner,则它们的命名分别变为:
/cmd_vel:/cmd_vel
cmd_vel: /dwa_planner/cmd_vel
1.3.4 私有命名
ros::NodeHandle nh ("~my_private_ns" ) ;ros::Subscriber sub = nh.subscribe ("my_private_topic" , ...); ros::NodeHandle nh ("~" ) ;ros::Subscriber sub = nh.subscribe ("my_private_topic" , ...);
私有命名与上述提到的命名都不同,它会把原本命名放入到<node_name>下。因此,上面订阅器的话题的命名如下:
<node_namespace>/<node_name>/my_private_ns/my_private_topic
1.4 常用命令
1.4.1 rosnode
rosnode ping 测试到节点的连接状态 rosnode list 列出活动节点 rosnode info 打印节点信息 rosnode machine 列出指定设备上节点 rosnode kill 杀死某个节点 rosnode cleanup 清除不可连接的节点
1.4.2 rostopic
rostopic bw 显示主题使用的带宽 rostopic delay 显示带有 header 的主题延迟 rostopic echo 打印消息到屏幕 rostopic find 根据类型查找主题 rostopic hz 显示主题的发布频率 rostopic info 显示主题相关信息 rostopic list 显示所有活动状态下的主题 rostopic pub 将数据发布到主题 rostopic type 打印主题类型
1.4.3 rosmsg
rosmsg show 显示消息描述 rosmsg info 显示消息信息 rosmsg list 列出所有消息 rosmsg md5 显示 md5 加密后的消息 rosmsg package 显示某个功能包下的所有消息 rosmsg packages 列出包含消息的功能包
1.4.4 rosservice
rosservice args 打印服务参数 rosservice call 使用提供的参数调用服务 rosservice find 按照服务类型查找服务 rosservice info 打印有关服务的信息 rosservice list 列出所有活动的服务 rosservice type 打印服务类型 rosservice uri 打印服务的 ROSRPC uri
1.4.5 rossrv
rossrv show 显示服务消息详情 rossrv info 显示服务消息相关信息 rossrv list 列出所有服务信息 rossrv md5 显示 md5 加密后的服务消息 rossrv package 显示某个包下所有服务消息 rossrv packages 显示包含服务消息的所有包
1.4.6 rosparam
rosparam set 设置参数 rosparam get 获取参数 rosparam load 从外部文件加载参数 rosparam dump 将参数写出到外部文件 rosparam delete 删除参数 rosparam list 列出所有参数
1.4.7 rosbag
rosbag record topic1 topic2 记录话题信息 rosbag play -r 1.5 xxx.bag 回放数据包信息
2. 坐标系变换
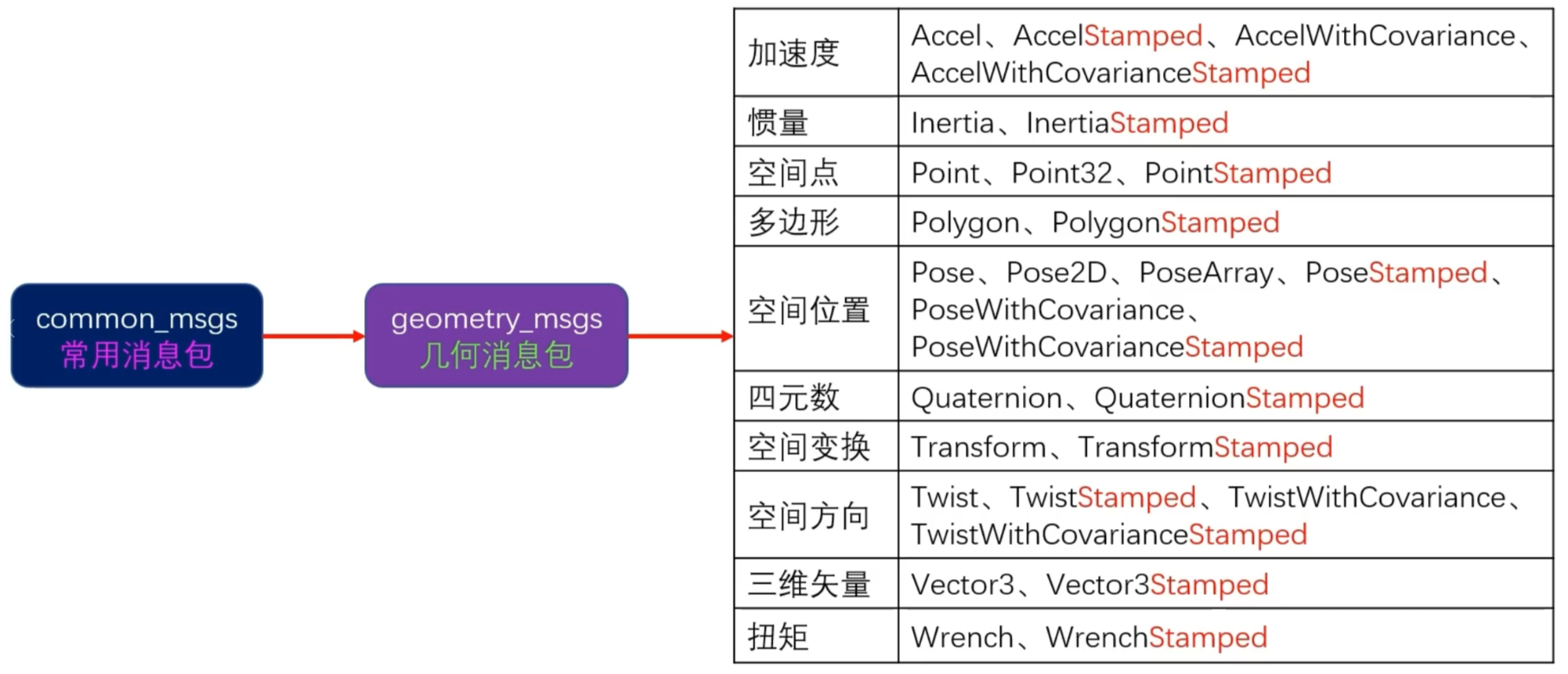
2.1 geometry_msgs
该功能包定义了一系列消息类型 ,涵盖了位置、方向、速度等几何概念 。
2.1.1 基本几何类型
Point : 表示三维空间中的一个点,包含 x, y, z 坐标。Vector3 : 类似于 Point,通常用来表示方向和速度。Quaternion : 表示空间中的旋转,包含 x, y, z, w 参数(四元数)。Pose : 结合了 Point 和 Quaternion,用来表示空间中的一个位置和方向。Twist : 描述线性和角速度,包含 Vector3 类型的 linear 和 angular 成分。
2.1.2 带时间戳的类型
带时间戳的消息类型,一般包含:基本几何类型、Header、时间戳以及坐标帧消息,用以表示所处的坐标信息。
我们可以在命令行键入:
rosmsg info geometry_msgs/消息类型 例如: rosmsg info geometry_msgs/PointStamped 结果: std_msgs/Header header uint32 seq time stamp string frame_id geometry_msgs/Point point float64 x float64 y float64 z
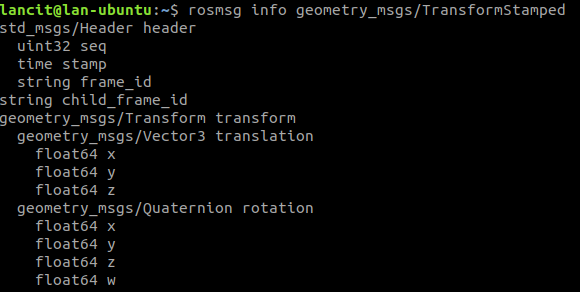
同时,我们还可以查看空间变换 对应的消息类型:rosmsg info geometry_msgs/TransformStamped。
结果:
std_msgs/Header header uint32 seq time stamp string frame_id string child_frame_id geometry_msgs/Transform transform geometry_msgs/Vector3 translation float64 x float64 y float64 z geometry_msgs/Quaternion rotation float64 x float64 y float64 z float64 w
2.2 坐标转换
2.2.1 静态坐标系变换
在机器人控制中,经常会进行不同坐标系之间的变换,而静态指的是:坐标系之间的相对位置保持不变 。
例如我们现在有一辆小车,上面搭载一个多线雷达,雷达检测到某处存在障碍物,则障碍物在主体坐标中的位置信息为?
实现逻辑:
设计发布方,将雷达检测到的障碍物信息及坐标系信息进行发布。
设计订阅者,收到上述信息,将其转换为主体坐标系下的位置信息。
使用依赖:tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs。
发布方:
#include "ros/ros.h" #include "tf2_ros/static_transform_broadcaster.h" #include "geometry_msgs/TransformStamped.h" #include "tf2/LinearMath/Quaternion.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"static_brocast" ); tf2_ros::StaticTransformBroadcaster broadcaster; geometry_msgs::TransformStamped ts; ts.header.seq = 100 ; ts.header.stamp = ros::Time::now (); ts.header.frame_id = "base_link" ; ts.child_frame_id = "laser" ; ts.transform.translation.x = 0.2 ; ts.transform.translation.y = 0.0 ; ts.transform.translation.z = 0.5 ; tf2::Quaternion qtn; qtn.setRPY (0 ,0 ,0 ); ts.transform.rotation.x = qtn.getX (); ts.transform.rotation.y = qtn.getY (); ts.transform.rotation.z = qtn.getZ (); ts.transform.rotation.w = qtn.getW (); broadcaster.sendTransform (ts); ros::spin (); return 0 ; }
订阅方:
#include "ros/ros.h" #include "tf2_ros/transform_listener.h" #include "tf2_ros/buffer.h" #include "geometry_msgs/PointStamped.h" #include "tf2_geometry_msgs/tf2_geometry_msgs.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"tf_sub" ); ros::NodeHandle nh; tf2_ros::Buffer buffer; tf2_ros::TransformListener listener (buffer) ; ros::Rate r (1 ) ; while (ros::ok ()) { geometry_msgs::PointStamped point_laser; point_laser.header.frame_id = "laser" ; point_laser.header.stamp = ros::Time::now (); point_laser.point.x = 1 ; point_laser.point.y = 2 ; point_laser.point.z = 7.3 ; try { geometry_msgs::PointStamped point_base; point_base = buffer.transform (point_laser,"base_link" ); ROS_INFO ("转换OK.\n" ); } catch (const std::exception& e) { ROS_INFO ("程序异常....." ); } r.sleep (); ros::spinOnce (); } return 0 ; }
2.2.2 动态坐标系的转换
在机器人控制中,不单单只有静态坐标系,还有动态坐标系,例如:世界坐标系与行动的机器人之间的坐标系关系。
假设:ROS乌龟案例中,以网格左下角为世界坐标系,乌龟自身为子坐标系,将乌龟的绝对运动信息转换为相当坐标系下的信息。
实现逻辑:
设计发布方,负责发布乌龟在世界坐标系下的坐标、偏移量、线速度以及角速度。
设计订阅者,进行转换,输出相对坐标信息。
使用依赖:tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs、turtlesim。
发布者:
#include "ros/ros.h" #include "turtlesim/Pose.h" #include "tf2_ros/transform_broadcaster.h" #include "geometry_msgs/TransformStamped.h" #include "tf2/LinearMath/Quaternion.h" void doPose (const turtlesim::Pose::ConstPtr& pose) static tf2_ros::TransformBroadcaster broadcaster; geometry_msgs::TransformStamped tfs; tfs.header.frame_id = "world" ; tfs.header.stamp = ros::Time::now (); tfs.child_frame_id = "turtle1" ; tfs.transform.translation.x = pose->x; tfs.transform.translation.y = pose->y; tfs.transform.translation.z = 0.0 ; tf2::Quaternion qtn; qtn.setRPY (0 ,0 ,pose->theta); tfs.transform.rotation.x = qtn.getX (); tfs.transform.rotation.y = qtn.getY (); tfs.transform.rotation.z = qtn.getZ (); tfs.transform.rotation.w = qtn.getW (); broadcaster.sendTransform (tfs); } int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"dynamic_tf_pub" ); ros::NodeHandle nh; ros::Subscriber sub = nh.subscribe <turtlesim::Pose>("/turtle1/pose" ,1000 ,doPose); ros::spin (); return 0 ; }
订阅者:
#include "ros/ros.h" #include "tf2_ros/transform_listener.h" #include "tf2_ros/buffer.h" #include "geometry_msgs/PointStamped.h" #include "tf2_geometry_msgs/tf2_geometry_msgs.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"dynamic_tf_sub" ); ros::NodeHandle nh; tf2_ros::Buffer buffer; tf2_ros::TransformListener listener (buffer) ; ros::Rate r (1 ) ; while (ros::ok ()) { geometry_msgs::PointStamped point_laser; point_laser.header.frame_id = "turtle1" ; point_laser.header.stamp = ros::Time (); point_laser.point.x = 1 ; point_laser.point.y = 1 ; point_laser.point.z = 0 ; try { geometry_msgs::PointStamped point_base; point_base = buffer.transform (point_laser,"world" ); ROS_INFO ("转换OK.\n" ); } catch (const std::exception& e) { ROS_INFO ("程序异常:%s" ,e.what ()); } r.sleep (); ros::spinOnce (); } return 0 ; }
可以看出:静态坐标系与动态坐标系之间的转换大致相同,区别在于:偏移量是否为变值。
2.2.3 多坐标系的转换
通过我们的学习,已经掌握了简单的两个坐标系之间的转换了。然鹅,实际中往往是多个坐标系之间的信息转换。
例如:在一世界坐标系下,存在机器人手关节、肘关节两个子坐标系,现在我们想要得到手关节在肘关节下的坐标信息。
假设:世界坐标系为world,肘关节坐标系为sub1,手关节坐标系为sub2。
实现逻辑:
设计发布方,发布sub1、sub2与世界坐标系之间的关系,由于实现逻辑一样,可采用launch中的node传参实现。
设计订阅方,订阅两个子坐标系的转换信息,再实现子坐标系之间的位置信息转换。
实现依赖:tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs、turtlesim。
发布方:
<launch > <node pkg ="tf2_ros" type ="static_transform_publisher" name ="sub1" args ="0.2 0.8 0.3 0 0 0 /world /sub1" output ="screen" /> <node pkg ="tf2_ros" type ="static_transform_publisher" name ="sub2" args ="0.5 0 0 0 0 0 /world /sub2" output ="screen" /> </launch >
值得注意的是,传参有两种传参方式:
1、传姿态角:x y z yaw pitch roll frame_id child_frame_id period_in_ms
2、传四元数:x y z qx qy qz qw frame_id child_frame_id period_in_ms
订阅方:
#include "ros/ros.h" #include "tf2_ros/transform_listener.h" #include "tf2/LinearMath/Quaternion.h" #include "tf2_geometry_msgs/tf2_geometry_msgs.h" #include "geometry_msgs/TransformStamped.h" #include "geometry_msgs/PointStamped.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"sub_frames" ); ros::NodeHandle nh; tf2_ros::Buffer buffer; tf2_ros::TransformListener listener (buffer) ; ros::Rate r (1 ) ; while (ros::ok ()) { try { geometry_msgs::TransformStamped tfs = buffer.lookupTransform ("sub2" ,"sub1" ,ros::Time (0 )); ROS_INFO ("sub1 相对于 sub2 的坐标关系:父坐标系ID=%s" ,tfs.header.frame_id.c_str ()); ROS_INFO ("sub1 相对于 sub2 的坐标关系:子坐标系ID=%s" ,tfs.child_frame_id.c_str ()); ROS_INFO ("sub1 相对于 sub2 的坐标关系:x=%.2f,y=%.2f,z=%.2f" , tfs.transform.translation.x, tfs.transform.translation.y, tfs.transform.translation.z ); geometry_msgs::PointStamped ps; ps.header.frame_id = "sub1" ; ps.header.stamp = ros::Time::now (); ps.point.x = 1.0 ; ps.point.y = 2.0 ; ps.point.z = 3.0 ; geometry_msgs::PointStamped psAtSub2; psAtSub2 = buffer.transform (ps,"sub2" ); ROS_INFO ("在 Son2 中的坐标:x=%.2f,y=%.2f,z=%.2f" , psAtSub2.point.x, psAtSub2.point.y, psAtSub2.point.z ); } catch (const std::exception& e) { ROS_INFO ("异常信息:%s" ,e.what ()); } r.sleep (); ros::spinOnce (); } return 0 ; }
2.2.3 查看TF转换关系
安装依赖:sudo apt install ros-noetic-tf2-tools。
启动坐标广播。
生成pdf关系图:rosrun tf2_tools view_frames.py。
查看:evince frames.pdf。
2.2.4 TF转换实操
现在进入实操环节,
假设:在乌龟控制案例中,有一乌龟A处于中央,另一乌龟B处于左下角,现在控制A乌龟运动,B乌龟实现跟随。
实现逻辑:
订阅A乌龟跟B乌龟相对于世界坐标系的位置信息。
将A的位置信息转换到B坐标系中。
计算B的速度,并控制运动。
创建第二个小乌龟:
#include "ros/ros.h" #include "turtlesim/Spawn.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"create_turtle" ); ros::NodeHandle nh; ros::ServiceClient client = nh.serviceClient <turtlesim::Spawn>("/spawn" ); ros::service::waitForService ("/spawn" ); turtlesim::Spawn spawn; spawn.request.name = "turtle2" ; spawn.request.x = 1.0 ; spawn.request.y = 2.0 ; spawn.request.theta = 3.12415926 ; bool flag = client.call (spawn); if (flag) { ROS_INFO ("乌龟%s创建成功!" ,spawn.response.name.c_str ()); } else { ROS_INFO ("乌龟2创建失败!" ); } ros::spin (); return 0 ; }
发布方:
#include "ros/ros.h" #include "turtlesim/Pose.h" #include "tf2_ros/transform_broadcaster.h" #include "tf2/LinearMath/Quaternion.h" #include "geometry_msgs/TransformStamped.h" std::string turtle_name; void doPose (const turtlesim::Pose::ConstPtr& pose) static tf2_ros::TransformBroadcaster broadcaster; geometry_msgs::TransformStamped tfs; tfs.header.frame_id = "world" ; tfs.header.stamp = ros::Time::now (); tfs.child_frame_id = turtle_name; tfs.transform.translation.x = pose->x; tfs.transform.translation.y = pose->y; tfs.transform.translation.z = 0.0 ; tf2::Quaternion qtn; qtn.setRPY (0 ,0 ,pose->theta); tfs.transform.rotation.x = qtn.getX (); tfs.transform.rotation.y = qtn.getY (); tfs.transform.rotation.z = qtn.getZ (); tfs.transform.rotation.w = qtn.getW (); broadcaster.sendTransform (tfs); } int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"pub_tf" ); if (argc != 2 ) { ROS_ERROR ("请传入正确的参数" ); } else { turtle_name = argv[1 ]; ROS_INFO ("乌龟 %s 坐标发送启动" ,turtle_name.c_str ()); } ros::NodeHandle nh; ros::Subscriber sub = nh.subscribe <turtlesim::Pose>(turtle_name + "/pose" ,1000 ,doPose); ros::spin (); return 0 ; }
订阅方:
#include "ros/ros.h" #include "tf2_ros/transform_listener.h" #include "geometry_msgs/TransformStamped.h" #include "geometry_msgs/Twist.h" int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"sub_TF" ); ros::NodeHandle nh; tf2_ros::Buffer buffer; tf2_ros::TransformListener listener (buffer) ; ros::Publisher pub = nh.advertise <geometry_msgs::Twist>("/turtle2/cmd_vel" ,1000 ); ros::Rate rate (10 ) ; while (ros::ok ()) { try { geometry_msgs::TransformStamped tfs = buffer.lookupTransform ("turtle2" ,"turtle1" ,ros::Time (0 )); geometry_msgs::Twist twist; twist.linear.x = 0.5 * sqrt (pow (tfs.transform.translation.x,2 ) + pow (tfs.transform.translation.y,2 )); twist.angular.z = 4 * atan2 (tfs.transform.translation.y,tfs.transform.translation.x); pub.publish (twist); } catch (const std::exception& e) { ROS_INFO ("错误提示:%s" ,e.what ()); } rate.sleep (); ros::spinOnce (); } return 0 ; }
启动文件:
<launch > <node pkg ="turtlesim" type ="turtlesim_node" name ="turtle1" output ="screen" /> <node pkg ="turtlesim" type ="turtle_teleop_key" name ="key_control" output ="screen" /> <node pkg ="demo_tf2_test" type ="Test01_Create_Turtle2" name ="turtle2" output ="screen" /> <node pkg ="demo_tf2_test" type ="Test02_TF2_Caster" name ="caster1" output ="screen" args ="turtle1" /> <node pkg ="demo_tf2_test" type ="Test02_TF2_Caster" name ="caster2" output ="screen" args ="turtle2" /> <node pkg ="demo_tf2_test" type ="Test03_TF2_Listener" name ="listener" output ="screen" /> </launch >
注意,应该注意多使用tf2,而非tf,tf2更加高效便捷。
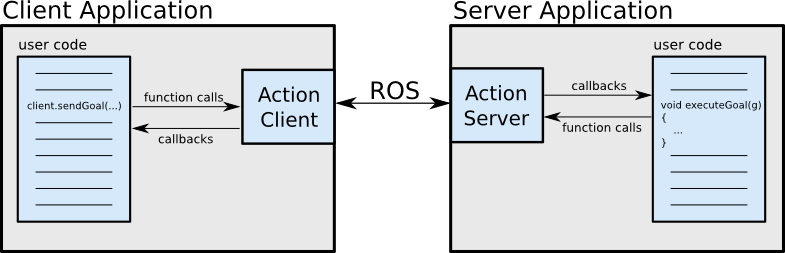
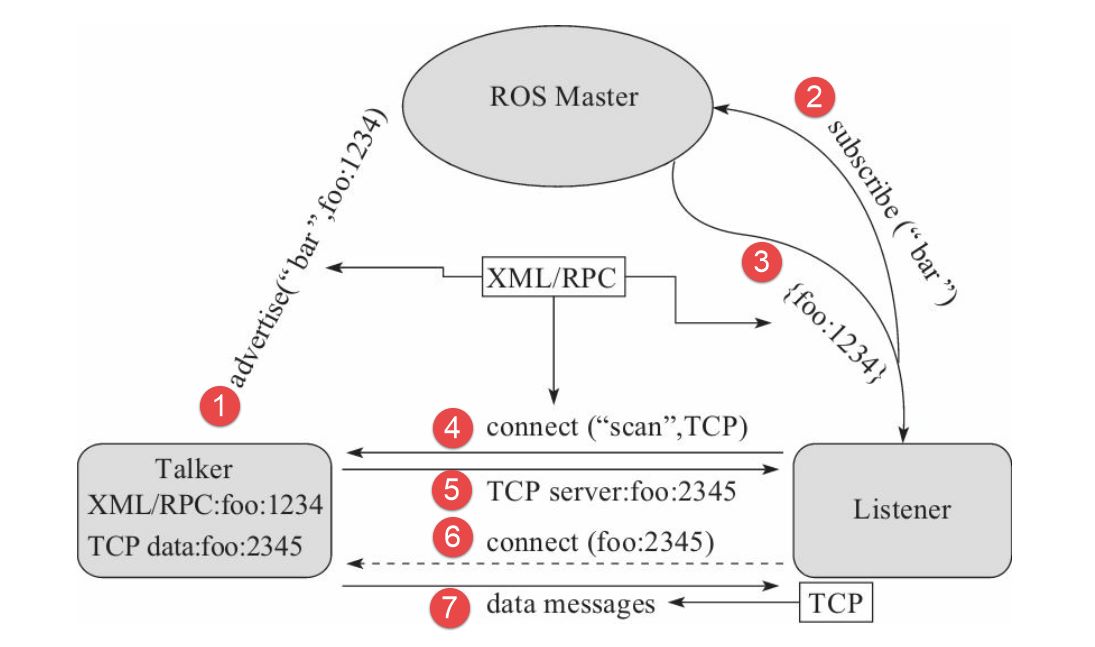
3. action通讯
action 是一种类似于服务通信的实现,其实现模型也包含请求和响应,但是不同的是,在请求和响应的过程中,服务端还可以连续的反馈当前任务进度,客户端可以接收连续反馈并且还可以取消任务。
action结构图解:
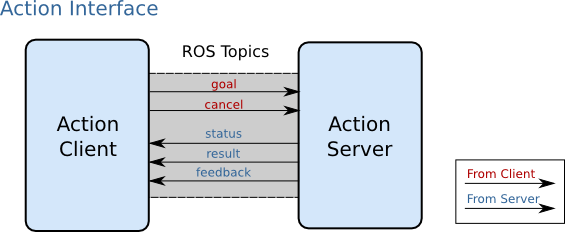
action通信接口图解:
goal:目标任务;
cacel:取消任务;
status:服务端状态;
result:最终执行结果(只会发布一次);
feedback:连续反馈(可以发布多次)。
作用
一般适用于耗时的请求响应场景,用以获取连续的状态反馈。
案例
创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。
另请参考:
3.1 自定义action文件
1.定义action文件
首先新建功能包,并导入依赖: roscpp rospy std_msgs actionlib actionlib_msgs;
然后功能包下新建 action 目录,新增 Xxx.action(比如:AddInts.action)。
action 文件内容组成分为三部分:请求目标值、最终响应结果、连续反馈 ,三者之间使用---分割示例内容如下:
int32 num --- int32 result --- float64 progress_bar
2.编辑配置文件
CMakeLists.txt
find_package (catkin REQUIRED COMPONENTS roscpp rospy std_msgs actionlib actionlib_msgs ) add_action_files( FILES AddInts.action ) generate_messages( DEPENDENCIES std_msgs actionlib_msgs ) catkin_package( CATKIN_DEPENDS roscpp rospy std_msgs actionlib actionlib_msgs )
3.编译
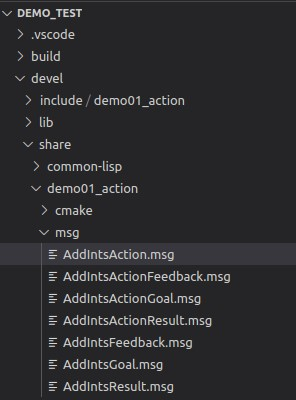
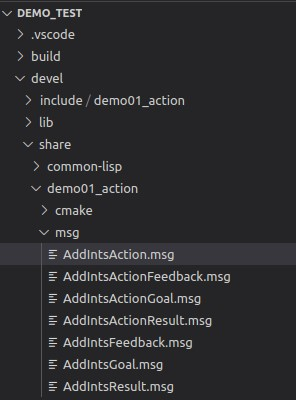
编译后会生成一些中间文件。
msg文件(…/工作空间/devel/share/包名/msg/xxx.msg):
C++ 调用的文件(…/工作空间/devel/include/包名/xxx.h):
3.2 action通讯实现(C++)
需求:
创建两个ROS 节点,服务器和客户端,客户端可以向服务器发送目标数据N(一个整型数据)服务器会计算 1 到 N 之间所有整数的和,这是一个循环累加的过程,返回给客户端,这是基于请求响应模式的,又已知服务器从接收到请求到产生响应是一个耗时操作,每累加一次耗时0.1s,为了良好的用户体验,需要服务器在计算过程中,每累加一次,就给客户端响应一次百分比格式的执行进度,使用 action实现。
流程:
编写action服务端实现;
编写action客户端实现;
编辑CMakeLists.txt;
编译并执行。
1. 服务端
#include "ros/ros.h" #include "actionlib/server/simple_action_server.h" #include "demo01_action/AddIntsAction.h" typedef actionlib::SimpleActionServer<demo01_action::AddIntsAction> Server;void cb (const demo01_action::AddIntsGoalConstPtr &goal,Server* server) int num = goal->num; ROS_INFO ("目标值:%d" ,num); int result = 0 ; demo01_action::AddIntsFeedback feedback; ros::Rate rate (10 ) ; for (int i = 1 ; i <= num; i++) { result += i; feedback.progress_bar = i / (double )num; server->publishFeedback (feedback); rate.sleep (); } demo01_action::AddIntsResult r; r.result = result; server->setSucceeded (r); ROS_INFO ("最终结果:%d" ,r.result); } int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ROS_INFO ("action服务端实现" ); ros::init (argc,argv,"AddInts_server" ); ros::NodeHandle nh; Server server (nh,"addInts" ,boost::bind(&cb,_1,&server),false ) ; server.start (); ros::spin (); return 0 ; }
PS:
可以先配置CMakeLists.tx文件并启动上述action服务端,然后通过 rostopic 查看话题,向action相关话题发送消息,或订阅action相关话题的消息。
2. 客户端
#include "ros/ros.h" #include "actionlib/client/simple_action_client.h" #include "demo01_action/AddIntsAction.h" typedef actionlib::SimpleActionClient<demo01_action::AddIntsAction> Client;void done_cb (const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result) if (state.state_ == state.SUCCEEDED) { ROS_INFO ("最终结果:%d" ,result->result); } else { ROS_INFO ("任务失败!" ); } } void active_cb () ROS_INFO ("服务已经被激活...." ); } void feedback_cb (const demo01_action::AddIntsFeedbackConstPtr &feedback) ROS_INFO ("当前进度:%.2f" ,feedback->progress_bar); } int main (int argc, char *argv[]) setlocale (LC_ALL,"" ); ros::init (argc,argv,"AddInts_client" ); ros::NodeHandle nh; Client client (nh,"addInts" ,true ) ; client.waitForServer (); demo01_action::AddIntsGoal goal; goal.num = 10 ; client.sendGoal (goal,&done_cb,&active_cb,&feedback_cb); ros::spin (); return 0 ; }
**PS:**等待服务启动,只可以使用client.waitForServer();,之前服务中等待启动的另一种方式ros::service::waitForService("addInts");不适用
3. 编译配置文件
add_executable(action01_server src/action01_server.cpp) add_executable(action02_client src/action02_client.cpp) ... add_dependencies(action01_server ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) add_dependencies(action02_client ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS}) ... target_link_libraries(action01_server ${catkin_LIBRARIES} ) target_link_libraries(action02_client ${catkin_LIBRARIES} ) Copy
4. 执行
首先启动 roscore,然后分别启动action服务端与action客户端,最终运行结果与案例类似。