Robot_localization
Robot_localization,将NED imu转为相对、绝对航向的 "ENU"数据
文章约定:
- 谈及
NED、ENU、NWU坐标系都是指的x y z对应顺序 - ROS中,x y z 轴对应红、绿、蓝
- 如有错误,请包容,以及麻烦在评论区勘误
- 书山有路勤为径,学海无涯苦作舟
1. 问题来源
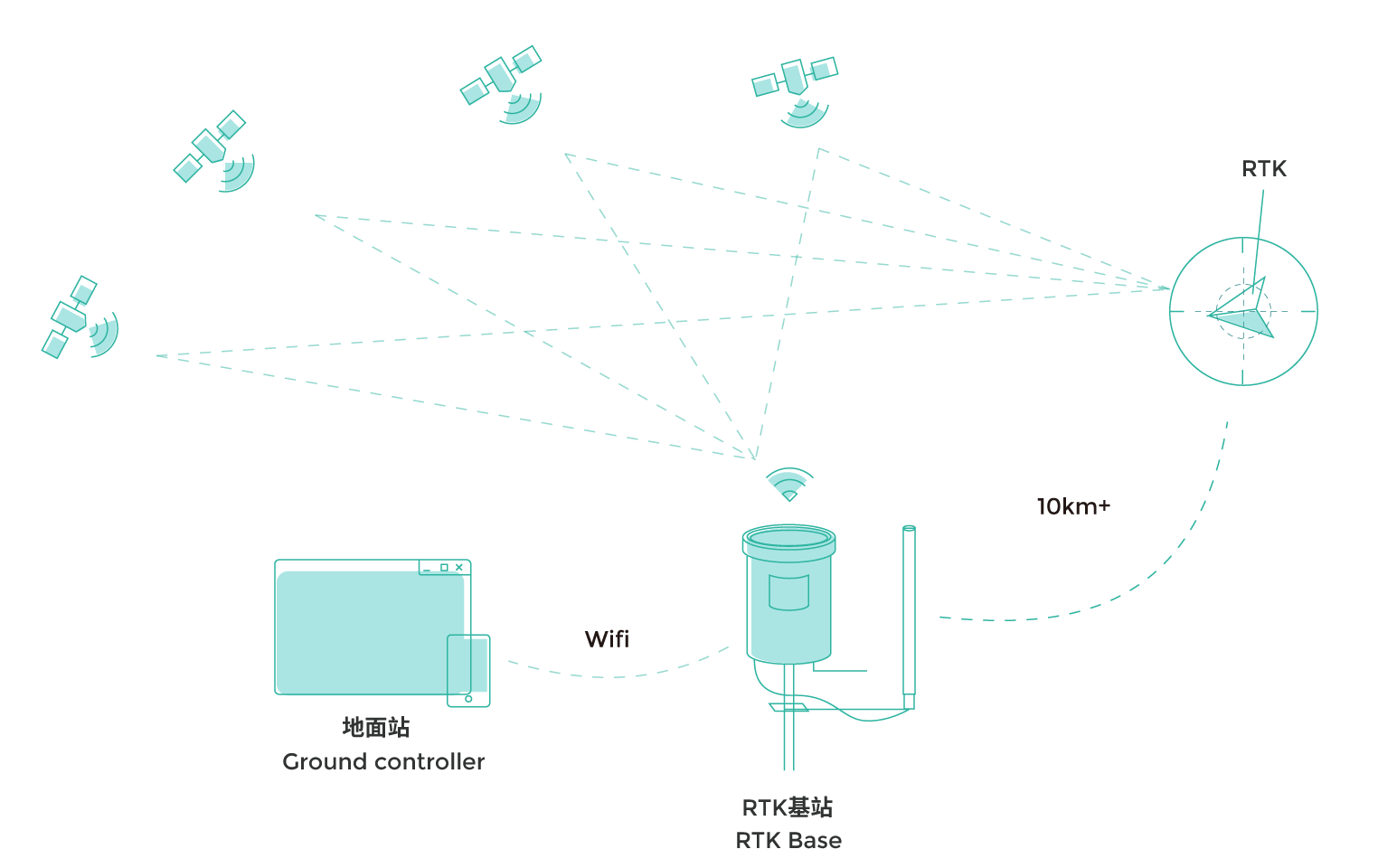
使用robot_localization进行:imu融合gps
问题:
- robot_localization中坐标系关系不明
NEDimu转"NEU"imu- sensor_msgs/Imu 中的四元数从
NED转"ENU" - 融合磁力计的绝对航向、相对航向
2. 解决
2.1 robot_localization 坐标系约定
首先,对robot_localization包中约定坐标系选取及数据单位:
总结上面两条:
- 坐标系约定为:map -> odom -> base_link -> imu、lidar、camera …
- 单位采用国际单位
上面是基本内容,但是对于理解robot_localization坐标系关系还差一脚。
首先明确robot_localization规定的:

- imu:采用
"ENU"坐标系 - gps:只要有经纬度信息就行,它转换后的utm也是采用
"ENU"坐标系,注意消息格式 - wheel odom:轮式里程计,又称为
encoder,特别的来了,采用的是NWU坐标系!
对wheel odom进行解释,官方对轮式里程计坐标系的定义:
原文:

翻译:
如果你有一个地面机器人:
逆时针旋转它,那么它的偏航角yaw应该增加,即为 U,
向前驱动它,它的 位置应该增加,即为 N
根据右手定则,显然为 NWU 坐标系
虽然robot_localization给出了坐标系约定,理论上根据这个进行转换就可以了,但是,坐标系跟实际中传感器安装顺序也有关,这样一综合考虑,就更加云里雾里了。
2.2 理解 robot_localization 坐标系
问题:为什么我要对 ENU 加引号?
答:那是因为,ENU不一定就必须是ENU,也可以是NWU,他们只是在偏航角上相差一个90°,并且这与放置方向有关。
例如:将robot底盘水平向右放置,那么,NWU 不就变成了 ENU 了吗?

浅浅解释一下:
- 首先,
wheel odom的x轴与车头对齐,z轴朝上,当小车水平放置:x y z对应ENU,垂直向上放置:EWU - 其次,
imu也是x轴与车头对齐,z轴朝上,当小车水平放置:x y z对应ENU,垂直向上放置:EWU - 最后,
base_link与wheel odom就是“一体关系”,当然base_link也跟你/cmd_vel运动模型解算方向有关,但推荐与wheel odom一致
故当小车水平放置,结合上图,并将传感器坐标系按上面对齐,此时只有一个要求:
- 小车水平放置在地球坐标系中,朝向东边,
yaw或者heading为0。
出处:在配置navsat_trasform_node节点时,yaw_offset参数

这就是robot_localization官方为什么之前说的是x轴朝向北为0,变为现在朝向东为0,因为传感器安装以及小车放置问题,结合官方图就很容易理解了。
2.3 NED imu转为 “ENU” imu
根据以上内容,NED下imu数据转为 "ENU" ,实际是将其从NED转为NWU坐标系。
提问:大师好像翻个面就行?
答:不行,物理翻面相当于绕x轴旋转 ,imu自身硬件解算出来的数据会导致x轴多了一个 的旋转值,故需要合理进行转换。
PS:市面上有现成的 NWU imu,或者提前问商家ROS驱动是否支持 NWU 坐标系输出。

如果以上条件都不具备,那么进行人为转换,先进行约定:
roll、pitch、yaw对应x、y、z,下面将四元数表示的旋转进行转换:- 变换顺序:x、y、z,将坐标系变为目标坐标系,绕定轴旋转,左乘,
R = R(z)R(y)R(x) - 微调:此时我们只是将imu坐标系进行转换,但实际的姿态还尚未对齐坐标系,绕动轴旋转,使其对齐,右乘
- 变换顺序:x、y、z,将坐标系变为目标坐标系,绕定轴旋转,左乘,
ps::微调是由于imu特性导致的,我们只是将理论坐标系对齐,但是实际imu硬件测的姿态向量还尚未对齐,需要进行微调。
简单理解就是:将imu翻面,坐标系对齐了,但是你发现x轴多了一个 值。
还有一点儿:在欧拉角与四元数的转换中,需要注意:
- 欧拉角的定义方式
- 旋转变换的先后顺序,不同旋转顺序,解算结果不同
- 旋转是绕定轴旋转还是动轴旋转,即左乘和右乘的区别
R = R(z)R(y)R(x),R = R(y)R(x)R(z),分别对应tf2::quaternion q:q.setRPY(),q.setEuler()
|
转换结果:
经验证,上述代码转换正确,但当进行更复杂旋转变换时,请参考:四元数旋转理解法、欧拉角与四元数互相转换
2.3 绝对航向、相对航向
从字面意思可知:
- 绝对航向:融合磁力计信息,得到imu与
磁极北之间的夹角关系 - 相对航向:以imu上电为基准点,基于陀螺仪得到的相对航向信息
简单看很好理解,那么问题出现在什么地方?
问题:
- 如果我需要imu能够在绝对与相对之间切换怎么办?
- imu支持绝对航向,但是给了欧拉角数据,我想要四元数版的,怎么办?
- imu不支持绝对航向,但有磁力计,怎么办?
- imu没磁力计怎么办?
q1:
- 答:首先考虑能够提供该功能驱动的imu厂家,如果不支持,请看问题:
q2、q3、q4
q2:
- 答:魔改驱动,将硬件融合磁力计得到的
RPY转为四元数,替代硬件解包出来的四元数
下面给出两种方法:
- 基于
tf2库:
|
- 基于
Eigen库:
|
注意:
yaw_nwu、pitch_nwu、roll_nwu表示的是NWU坐标系下的欧拉角,与NED的关系:
- z轴:
yaw_nwu = - yaw_ned- y轴:
pitch_nwu = - pitch_ned- x轴:
roll_nwu = roll_ned
q3:
请参考:
- madgwick滤波:ROS imu_filter_madgwick
- 互补滤波:ROS imu_complementary_filter
q4:
如果没有磁力计:
- 将GNSS或者定位定向RTK提供的航向角信息接入到
imu中(如果可接入) - 设置
robot_localization中的yaw_offset参数 - 采用相对航向,将小车车头方向始终对齐地理东启动
我们需要的是与地理北之间的偏航关系,但是实际指向的是磁极北,误差叫
磁偏角,我们需要在robot_localization中给出这个值:
- magnetic_declination_radians:在线计算,单位:Rad
感谢您的来访,欢迎交流学习分享~